低空經(jīng)濟(jì)背景下多無(wú)人機(jī)物流協(xié)同配送任務(wù)分配優(yōu)化研究
首發(fā)時(shí)間:2025-10-22
艾學(xué)軼,女,副教授、碩導(dǎo),主要研究方向:物流與供應(yīng)鏈管理
賀禮鵬 1賀禮鵬(2000-),男,碩士研究生,主要研究方向:物流與供應(yīng)鏈管理
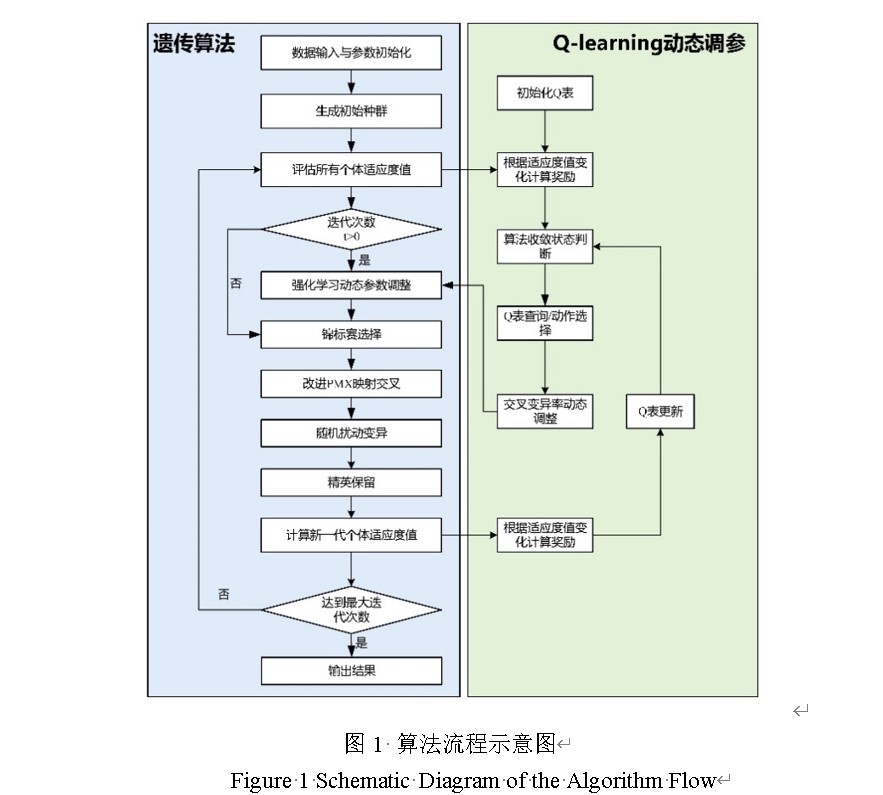
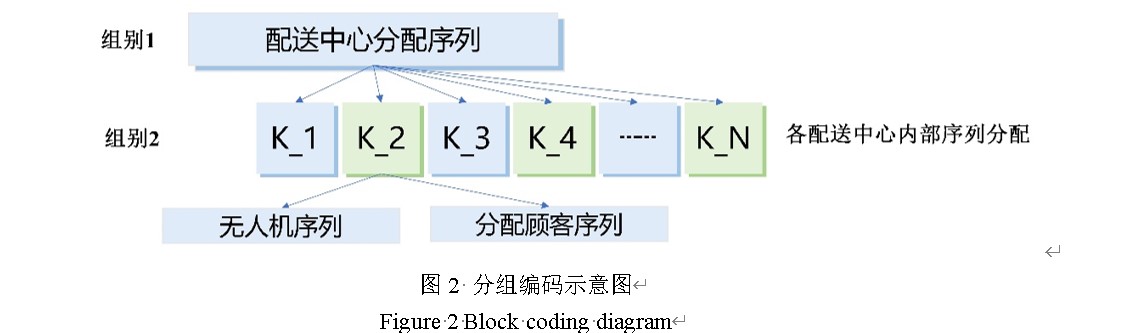
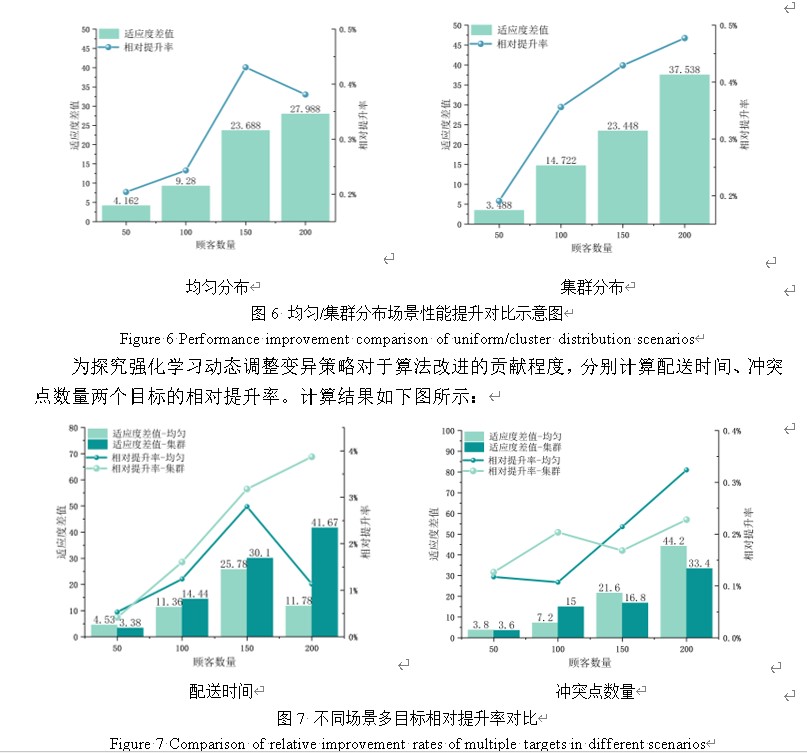
摘要:隨著低空經(jīng)濟(jì)上升為國(guó)家戰(zhàn)略產(chǎn)業(yè),城市無(wú)人機(jī)物流配送面臨空域密集化帶來(lái)的協(xié)同調(diào)度挑戰(zhàn)。無(wú)人機(jī)數(shù)量的增加不僅增加了任務(wù)分配的復(fù)雜性,還導(dǎo)致了路徑?jīng)_突問(wèn)題的加劇,進(jìn)一步威脅到飛行安全與調(diào)度效率。針對(duì)這一問(wèn)題,本研究提出一種融合遺傳算法與Q-learning強(qiáng)化學(xué)習(xí)的混合智能優(yōu)化框架(GA-QL)。該框架通過(guò)雙目標(biāo)優(yōu)化模型,在滿足實(shí)際約束條件下,同步優(yōu)化配送完成時(shí)間和路徑?jīng)_突點(diǎn)數(shù)量。在算法設(shè)計(jì)層面,采用改進(jìn)的PMX交叉算子和隨機(jī)擾動(dòng)變異策略優(yōu)化"配送中心-無(wú)人機(jī)-顧客點(diǎn)"的任務(wù)分配方案。創(chuàng)新性地引入Q-learning模塊實(shí)時(shí)監(jiān)控算法收斂狀態(tài),動(dòng)態(tài)調(diào)整交叉率和變異率參數(shù),有效避免早熟收斂問(wèn)題。實(shí)驗(yàn)結(jié)果表明:在多種任務(wù)分布場(chǎng)景下,GA-QL框架相比傳統(tǒng)算法在路徑?jīng)_突控制與計(jì)算效率方面均表現(xiàn)出顯著優(yōu)勢(shì),最高可降低適應(yīng)度值8.13%。此外,通過(guò)消融實(shí)驗(yàn)進(jìn)一步驗(yàn)證了強(qiáng)化學(xué)習(xí)對(duì)于遺傳算法提升的有效性,隨著問(wèn)題規(guī)模的擴(kuò)大,其提升效率更加明顯。
關(guān)鍵詞: 多無(wú)人機(jī) 任務(wù)分配 Q-learning 遺傳算法
For information in English, please click here
Research on task allocation optimization of multi-UAV logistics collaborative distribution under low-altitude economic background
艾學(xué)軼,女,副教授、碩導(dǎo),主要研究方向:物流與供應(yīng)鏈管理
He Lipeng 1賀禮鵬(2000-),男,碩士研究生,主要研究方向:物流與供應(yīng)鏈管理
Abstract:With the rise of low-altitude economy as a national strategic industry, urban UAV logistics and distribution is facing the challenge of collaborative scheduling brought by the densification of airspace. The increase in the number of Uavs not only increases the complexity of task allocation, but also leads to the intensification of path conflict problem, which further threatens flight safety and scheduling efficiency. To solve this problem, this study proposes a hybrid intelligent optimization framework (GA-QL) integrating genetic algorithm and Q-learning reinforcement learning. In this framework, the delivery completion time and the number of path conflict points are simultaneously optimized by the dual-objective optimization model under the actual constraints. At the level of algorithm design, the improved PMX crossover operator and random disturbance mutation strategy are used to optimize the task allocation scheme of "distribution center-UAV-customer point". The Q-learning module is innovatively introduced to monitor the convergence state of the algorithm in real time, dynamically adjust the parameters of crossover rate and mutation rate, and effectively avoid the problem of premature convergence. Experimental results show that GA-QL framework has significant advantages in path conflict control and computational efficiency compared with traditional algorithms in various task distribution scenarios, and can reduce the fitness value by up to 8.13%. In addition, the effectiveness of reinforcement learning for genetic algorithm improvement is further verified through ablation experiments. With the expansion of problem scale, the improvement efficiency is more obvious.
Keywords: multi-UAV Assignment of tasks Q-learning Genetic algorithm
基金:
論文圖表:
引用


No.****
動(dòng)態(tài)公開(kāi)評(píng)議
共計(jì)0人參與
勘誤表
低空經(jīng)濟(jì)背景下多無(wú)人機(jī)物流協(xié)同配送任務(wù)分配優(yōu)化研究
中國(guó)科技論文在線 版權(quán)所有
網(wǎng)站地圖|
在線首頁(yè)|
在線簡(jiǎn)介|
服務(wù)條款|
聯(lián)系我們

京公網(wǎng)安備 11040202430024號(hào) 京ICP備15006316號(hào)-2| 網(wǎng)絡(luò)出版服務(wù)許可證 (總)網(wǎng)出證(京)字第083號(hào) | 文保網(wǎng)安備案號(hào):1101080066



 .txt
.txt .ris
.ris .doc
.doc
評(píng)論
全部評(píng)論