0
0

多載位機器人存取系統(tǒng)貨箱存取作業(yè)協(xié)同調(diào)度優(yōu)化
首發(fā)時間:2025-08-28
張瑾萱(1999-),女,碩士研究生,主要研究方向:物流系統(tǒng)決策與優(yōu)化
劉翱 1劉翱(1987-),男,副教授,主要研究方向:優(yōu)化調(diào)度
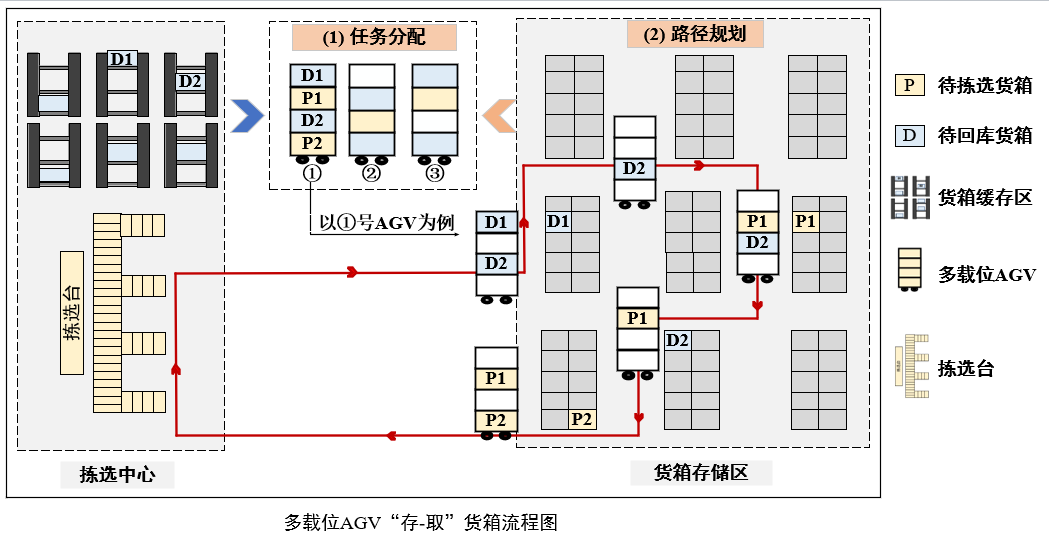
摘要:多載位機器人存取系統(tǒng)是一類新型的自動揀選系統(tǒng),它攜帶的多載位自動小車一次能同時搬運多個貨箱進行存取作業(yè),這既增加了貨箱與自動小車之間的分配難度,也給貨箱存取作業(yè)調(diào)度帶來了極大的挑戰(zhàn)。本文研究多載位機器人存取系統(tǒng)貨箱存取作業(yè)協(xié)同調(diào)度問題,建立了以小車的總行駛距離最小化為目標(biāo)的混合0-1整數(shù)規(guī)劃模型;結(jié)合問題特征,基于存儲交替分配的原則構(gòu)造貪婪初始解,設(shè)計了5個局部搜索算子和貪婪修復(fù)策略,基于此設(shè)計求解該問題的迭代局部搜索算法;對小、中、大規(guī)模的共400個算例進行仿真實驗和對比分析,結(jié)果表明:迭代局部搜索算法的求解效果整體優(yōu)于精確算法、變鄰域搜索算法、遺傳算法、模擬退火算法;與貨箱先存后取策略和貨箱獨立存取策略相比,本文提出的貨箱協(xié)同存取策略能顯著提升貨箱存取作業(yè)的效率;分析了自動小車的最大載位數(shù)和貨箱存取比例對系統(tǒng)的影響,可為倉儲系統(tǒng)的設(shè)備選型與作業(yè)調(diào)度提供有價值的管理啟示。
關(guān)鍵詞: 多載位機器人存取系統(tǒng) 貨箱存取 協(xié)同調(diào)度 迭代局部搜索
For information in English, please click here
Collaborative Scheduling Optimization for Tote Storage and Retrieval Operations in Multi-Load Robotic Storage and Retrieval System
張瑾萱(1999-),女,碩士研究生,主要研究方向:物流系統(tǒng)決策與優(yōu)化
LIU Ao 1劉翱(1987-),男,副教授,主要研究方向:優(yōu)化調(diào)度
Abstract:The multi-load robot storage and retrieval system is a new type of advanced automated order picking system featuring multi-load automated guided vehicles, which can simultaneously carry multiple totes to execute tote storage and retrieval operations at one time. This not only increases the complexity of allocating totes to vehicles but also poses significant challenges to the scheduling of tote storage and retrieval operations. This paper investigates the collaborative scheduling problem of tote storage and retrieval operations in the multi-load robotic retrieval system. A mixed 0-1 integer programming model with the objective of minimizing the total travel distance of the vehicles is established. A greedy initial solution is constructed by employing an alternative strategy for allocating storage and retrieval operations. We designed five local search operators and a greedy repair strategy, and developed an iterated local search algorithm for solving this problem. Extensive simulation experiments and comparative analyses are conducted on 400 test instances of small, medium, and large scales. The results show that the iterated local search algorithm performs better overall than the exact algorithm, variable neighborhood search algorithm, genetic algorithm, and simulated annealing algorithm. Compared with the storage-then-retrieval strategy and the independent storage-and-retrieval strategy, the proposed collaborative storage-and-retrieval strategy can significantly improve the efficiency of tote storage and retrieval operations. We analyze the impact of key parameters, such as the maximum load capacity of vehicles and the ratio of tote storage-to-retrieval operations, on the system. These conclusions can provide valuable management insights for equipment selection and operation scheduling in warehouse systems.
Keywords: Multi-load robotic storage and retrieval system Tote storage and retrieval Collaborative scheduling Iterative local search.
基金:
論文圖表:
引用


No.****
動態(tài)公開評議
共計0人參與
勘誤表
多載位機器人存取系統(tǒng)貨箱存取作業(yè)協(xié)同調(diào)度優(yōu)化
中國科技論文在線 版權(quán)所有
網(wǎng)站地圖|
在線首頁|
在線簡介|
服務(wù)條款|
聯(lián)系我們

京公網(wǎng)安備 11040202430024號 京ICP備15006316號-2| 網(wǎng)絡(luò)出版服務(wù)許可證 (總)網(wǎng)出證(京)字第083號 | 文保網(wǎng)安備案號:1101080066


 .txt
.txt .ris
.ris .doc
.doc
評論
全部評論